
Da ich aber meine Engine für mich behalten wollte, hab ich mal ne komplett neue geschrieben um diese quasi als Comunity-Engine weiter zu entwickeln. Bis jetzt sinds auch nur ca 400 Zeilen. Würd mich freuen, wenn mein Name bei Verwendung irgendwo erwähnt werden würde.
Ich freue mich über jegliche Verbesserungen/Optimierungen.
Nadann viel Spaß damit.
Code: Alles auswählen
;vector stuff / Vektor Zeugs
Structure vect
x.d
y.d
EndStructure
Procedure vect(*v.vect,x.d,y.d) ; / zum erstellen eines Vektors
*v\x=x
*v\y=y
EndProcedure
Procedure Normalize(*v.vect)
Protected Length.d
Length=Sqr(*v\x**v\x+*v\y**v\y)
If Length<>0
*v\x/Length
*v\Y/Length
EndIf
EndProcedure
Procedure.d Length(*v.vect) ; / Länge
ProcedureReturn Sqr(*v\x**v\x+*v\y**v\y)
EndProcedure
Procedure.d DotProduct(*v1.vect,*v2.vect) ; / Kreuzprodukt
ProcedureReturn (*v1\x**v2\x+*v1\y**v2\y)
EndProcedure
;Physic Structures
Structure count ; for counting the physic variables / zum mitzählen der PhysiK Variablen
particle.l
constraint.l
EndStructure
Structure particle
r.d ;radius / Radius
p.vect
oldp.vect
a.vect ;acceleration / Beschleunigung
m.d ;mass=0 represents static Particle / masse=0 represintiert starre Körper
id.l
collision.b ;>1 if the particle collides / >1 wenn der Particle kollidiert
EndStructure
Global Dim particle.particle(10000)
Structure constraint
*p1.particle
*p2.particle
e.d ;elastizity (between 1-0.001) / Elastizität (zwischen 1-0.001)
length.d
id.l
EndStructure
Global Dim constraint.constraint(10000)
Structure halfspace
p.vect ; / Stützvektor
v.vect ; / Richtungsvektor
n0.vect ;normalized normal vector / normierter Normalenvektor
EndStructure
Global NewList halfspace.halfspace()
Global count.count
Global timestep.d; delta t
timestep=0.8
Global iterations.l ; / Anzahl der Rechendurchläufe
iterations=5
Global itelligentiterations.b ; increases Performance, but can be buggy / erhöht die Rechenleistung, kann aber fehlerhaft sein (bei zu vielen Iterationen)
itelligentiterations=1
Global gravity.vect
gravity\y=0.5
Global particleid.l
particleid=1
Global constraintid.l
constraintid=1
Global entityid.l
entityid=1
Global airfriction.d ; / Luftwiderstand
airfriction=0.02
Procedure.l CountParticles() ;is used by the Engine / wird nur von Engine benutzt
Protected i.l
For i=1 To ArraySize(particle())
If particle(i)\id=0
ProcedureReturn (i-1)
EndIf
Next
EndProcedure
Procedure.l CountConstraint();is used by the Engine / wird nur von Engine benutzt
Protected i.l
For i=1 To ArraySize(constraint())
If constraint(i)\id=0
ProcedureReturn (i-1)
EndIf
Next
EndProcedure
Procedure CountAll();is used by the Engine. Updates the "count" variable/ wird nur von Engine benutzt. Aktuallisiert die "count" variable
count\particle=CountParticles()
count\constraint=CountConstraint()
EndProcedure
Procedure PointToParticle(x,y,inc); searched the particle on the given coardinate / sucht den Particle an der gegebenen Koardinate
Protected diff.vect
Protected length.d
For i=1 To count\particle
vect(diff,x-particle(i)\p\x,y-particle(i)\p\y)
length=length(diff)
If length<particle(i)\r+inc
ProcedureReturn particle(i)
EndIf
Next
EndProcedure
Procedure CreateParticle(px.d,py.d,rad.d,mass.d) ;to create a particle / zum erstellen eines Particles
Protected nr.l
nr.l=count\particle+1
particle(nr)\r=rad
particle(nr)\m=mass
particle(nr)\p\x=px
particle(nr)\p\y=py
particle(nr)\oldp\x=px
particle(nr)\oldp\y=py
particle(nr)\id=particleid
vect(particle(nr)\a,gravity\x,gravity\y) ;Gravitation
particleid+1
count\particle+1
ProcedureReturn particle(nr)
EndProcedure
Procedure CreateConstraint(*p1.particle,*p2.particle,elasticity.d) ;to create a constraint / zum erstellen eines Constraints (Feder)
Protected nr.l
If *p1\p\x<>*p2\p\x Or *p1\p\y<>*p2\p\y
nr.l=count\constraint+1
constraint(nr)\p1=*p1
constraint(nr)\p2=*p2
constraint(nr)\length=Sqr((*p2\p\x-*p1\p\x)*(*p2\p\x-*p1\p\x)+(*p2\p\y-*p1\p\y)*(*p2\p\y-*p1\p\y))
constraint(nr)\id=constraintid
constraint(nr)\e=elasticity
constraintid+1
count\constraint+1
ProcedureReturn constraint(nr)
EndIf
EndProcedure
Procedure AddHalfSpace(px,py,vx.d,vy.d) ;to add a halfspace (ground) / zum hinzufügen eines Halfspaces (Boden)
AddElement(halfspace())
halfspace()\p\x=px
halfspace()\p\y=py
halfspace()\v\x=vx
halfspace()\v\y=vy
vect(halfspace()\n0,vy,-vx)
normalize(halfspace()\n0)
EndProcedure
Procedure DeleteConstraint(*c.constraint)
For i=1 To count\constraint
If constraint(i)\id=*c\id
For j=i To count\constraint
constraint(j)=constraint(j+1)
Next
EndIf
Next
count\constraint-1
EndProcedure
Procedure DeleteParticle(*p.particle)
For i=1 To count\constraint
If constraint(i)\p1\id=*p\id Or constraint(i)\p2\id=*p\id
DeleteConstraint(constraint(i))
i-1
delete+1
EndIf
Next
Structure remindedge
p1id.l
p2id.l
cid.l
EndStructure
Protected NewList remindedge.remindedge()
For i=1 To count\constraint
AddElement(remindedge())
remindedge()\p1id=constraint(i)\p1\id
remindedge()\p2id=constraint(i)\p2\id
remindedge()\cid=constraint(i)\id
Next
For i=1 To count\particle
If particle(i)\id=*p\id
For j=i To count\particle
particle(j)=particle(j+1)
Next
EndIf
Next
count\particle-1
ResetList(remindedge())
While NextElement(remindedge())
For i=1 To count\constraint
If constraint(i)\id=remindedge()\cid
For j=1 To count\particle
If particle(j)\id=remindedge()\p1id
constraint(i)\p1=particle(j)
ElseIf particle(j)\id=remindedge()\p2id
constraint(i)\p2=particle(j)
EndIf
Next
EndIf
Next
Wend
EndProcedure
Procedure UpdateVerlet() ;standart Verlet integration / Standart Verlet Integration
Protected old.vect
Protected v.vect
Protected i.l
For i=1 To count\particle
If particle(i)\m<>0
vect(old,particle(i)\p\x,particle(i)\p\y) ;Geschwindigkeit wird aus alter und neuer poition berrechnet + beschleunigung(gravitation)
particle(i)\p\x=2*particle(i)\p\x-particle(i)\oldp\x+particle(i)\a\x*timestep*timestep
particle(i)\p\y=2*particle(i)\p\y-particle(i)\oldp\y+particle(i)\a\y*timestep*timestep
vect(particle(i)\oldp,old\x,old\y)
;Luftwiderstand
vect(v,particle(i)\p\x-old\x,particle(i)\p\y-old\y)
vect(v,v\x*airfriction,v\y*airfriction)
vect(particle(i)\p,particle(i)\p\x-v\x,particle(i)\p\y-v\y)
EndIf
Next
EndProcedure
Procedure UpdateConstraints() ;updates the constraints / aktualisiert die Constraints (Federn)
Protected DeltaX.d
Protected DeltaY.d
Protected DeltaLength.d
Protected Diff.d
Protected i.l
For i=1 To count\constraint
DeltaX=constraint(i)\p2\p\x-constraint(i)\p1\p\x
DeltaY=constraint(i)\p2\p\y-constraint(i)\p1\p\y
DeltaLength=Sqr(DeltaX*DeltaX+DeltaY*DeltaY)
Diff=(DeltaLength-constraint(i)\length)/DeltaLength
Protected m.d
m=constraint(i)\p1\m+constraint(i)\p2\m
If constraint(i)\p1\m<>0
If constraint(i)\p2\m=0
constraint(i)\p1\p\x=constraint(i)\p1\p\x+DeltaX*Diff*constraint(i)\e
constraint(i)\p1\p\y=constraint(i)\p1\p\y+DeltaY*Diff*constraint(i)\e
Else
constraint(i)\p1\p\x=constraint(i)\p1\p\x+DeltaX*Diff*constraint(i)\e*(constraint(i)\p2\m/m)
constraint(i)\p1\p\y=constraint(i)\p1\p\y+DeltaY*Diff*constraint(i)\e*(constraint(i)\p2\m/m)
EndIf
EndIf
If constraint(i)\p2\m<>0
If constraint(i)\p1\m=0
constraint(i)\p2\p\x=constraint(i)\p2\p\x-DeltaX*Diff*constraint(i)\e
constraint(i)\p2\p\y=constraint(i)\p2\p\y-DeltaY*Diff*constraint(i)\e
Else
constraint(i)\p2\p\x=constraint(i)\p2\p\x-DeltaX*Diff*constraint(i)\e*(constraint(i)\p1\m/m)
constraint(i)\p2\p\y=constraint(i)\p2\p\y-DeltaY*Diff*constraint(i)\e*(constraint(i)\p1\m/m)
EndIf
EndIf
Next
EndProcedure
Procedure SetCollisionsToZero() ; resets the collisions / resetet die Kollisionen
Protected i.l
For i=1 To count\particle
particle(i)\collision=0
Next
EndProcedure
Procedure ProcessCollision(*p1.particle,*p2.particle) ; collision-solving / Kollisionsverarbetung
Protected rad.d
Protected v.vect
Protected vlength.d
rad=*p1\r+*p2\r
Protected distance.d
distance=(*p2\p\x-*p1\p\x)*(*p2\p\x-*p1\p\x)+(*p2\p\y-*p1\p\y)*(*p2\p\y-*p1\p\y) ;die Wurzel wird später gezogen um Rechnerleistung zu sparen
If distance<(rad*rad) ; wenn die distanz kleiner als beide radien addiert ist, dann kollidiern die Objekte
If distance<>0
distance=Sqr(distance) ;wir hab en ja das Quadrat berprüft
vect(v,*p2\p\x-*p1\p\x,*p2\p\y-*p1\p\y) ;Kollisionsvektor wird errechnet (Richtung)
vect(v,v\x/distance,v\y/distance) ;Vektor wird normiert
vlength=rad-distance ;Länge des Vektors
vect(v,v\x*vlength,v\y*vlength) ;Vektor wird auf die errechnete Länge multipliziert (skalar)
Else
vect(v,(Random(10)-5)/10,(Random(10)-5)/10);Gibt einen Zufalls Impuls falls die Kugeln aufeinander liegen
EndIf
Protected m.d
m=*p1\m+*p2\m
If *p1\m<>0
If *p2\m=0
*p1\p\x-v\x
*p1\p\y-v\y
Else
*p1\p\x-v\x*(*p2\m/m) ;Position wir mit dem errechneten Vektor verschowben
*p1\p\y-v\y*(*p2\m/m) ;den Rest regelt die Verlet Integration
EndIf
EndIf
If *p2\m<>0
If *p1\m=0
*p2\p\x+v\x
*p2\p\y+v\y
Else
*p2\p\x+v\x*(*p1\m/m)
*p2\p\y+v\y*(*p1\m/m)
EndIf
EndIf
ProcedureReturn 1
ElseIf distance=(rad*rad)
ProcedureReturn 1
Else
ProcedureReturn 0
EndIf
EndProcedure
Structure CollisionRemark ; used for intelligentiterations / wird zum merken bei intelligenten Iterationen verwendet
*p1.particle
*p2.particle
EndStructure
Global NewList CollisionRemark.CollisionRemark()
Procedure UpdateCollisions() ; collision-loop / Kollisionsschleife
Protected i.l
Protected j.l
Protected k.l
SetCollisionsToZero()
For i=1 To count\particle
For j=1 To count\particle
If particle(i)\id<>particle(j)\id
If ProcessCollision(particle(i),particle(j)) ;jedes Object wir mit jedem auf Collision überprüft
particle(i)\collision+1
If itelligentiterations=1
AddElement(CollisionRemark())
CollisionRemark()\p1=particle(i)
CollisionRemark()\p2=particle(j)
EndIf
EndIf
EndIf
Next
Next
UpdateConstraints() ;Federn werden geupdated
EndProcedure
Procedure UpdateCollisionsIntelligent()
Protected i.l
Protected j.l
Protected k.l
SetCollisionsToZero()
ResetList(CollisionRemark())
While NextElement(CollisionRemark())
If Not ProcessCollision(CollisionRemark()\p1,CollisionRemark()\p2)
DeleteElement(CollisionRemark())
EndIf
Wend
UpdateConstraints() ;Federn werden geupdated
EndProcedure
Procedure UpdateParticleHalfspaceCollision(); uses the Hessche Normal Form to solve collision / benutzt die Hessische Normalenform zum lösen der Kollision
Protected n0.vect
Protected length.d
Protected distance.d
Protected h.vect
ResetList(halfspace())
While NextElement(halfspace())
For i=1 To count\particle
vect(n0,halfspace()\n0\x,halfspace()\n0\y)
vect(h,particle(i)\p\x-halfspace()\p\x,particle(i)\p\y-halfspace()\p\y)
distance=dotproduct(h,n0)
distance-particle(i)\r
If distance<0
vect(h,n0\x*distance,n0\y*distance)
vect(particle(i)\p,particle(i)\p\x-h\x,particle(i)\p\y-h\y)
particle(i)\collision=1
EndIf
Next
Wend
EndProcedure
Procedure CalcStep() ; the most important procedure, witch is used in your mainloop / die wichtigste Procedure, welche in der Hauptschleife benutzt wird
CountAll()
UpdateVerlet()
For i=1 To iterations
If i=1 Or itelligentiterations=0
UpdateCollisions()
Else
UpdateCollisionsIntelligent()
EndIf
UpdateParticleHalfspaceCollision()
Next
ClearList(CollisionRemark())
EndProcedure
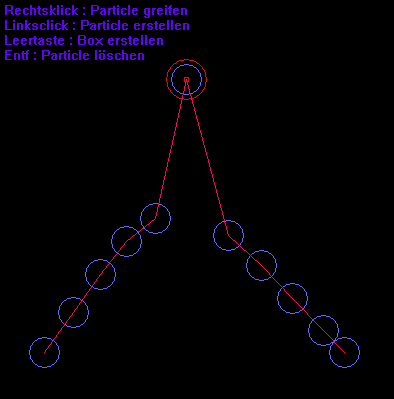
Screenshot:
http://www.xup.in/pic,14437720/screenshot_cvp.PNG
Code: Alles auswählen
XIncludeFile "CircleVerletPhysics.pb"
Global Screen.vect
vect(screen,800,600)
Global MouseClick.b
Global *SelectedParticle.particle
Global timer.l
Global Frames.l
Global Time.d
Global StartTime.d
Global fps.l
Procedure FrameCount()
Time=ElapsedMilliseconds()-StartTime
Frames+1
If Time>1000
StartTime=ElapsedMilliseconds()
fps=Frames
Frames=0
EndIf
;timestep=60/fps*0.8
EndProcedure
Procedure Init()
InitSprite()
InitKeyboard()
InitMouse()
OpenWindow(0, 0, 0, Screen\x, Screen\y, "physix", #PB_Window_ScreenCentered | #PB_Window_SystemMenu | #PB_Window_SizeGadget)
OpenWindowedScreen(WindowID(0), 0, 0, Screen\x,Screen\y,0, 0, 0)
EndProcedure
Procedure CreateBox(x1.d,y1.d,x2.d,y2.d,r,m)
CreateParticle(x1,y1,r,m)
CreateParticle(x1,y2,r,m)
CreateParticle(x2,y1,r,m)
CreateParticle(x2,y2,r,m)
CreateConstraint(particle(count\particle),particle(count\particle-1),1)
CreateConstraint(particle(count\particle-1),particle(count\particle-2),1)
CreateConstraint(particle(count\particle-2),particle(count\particle-3),1)
CreateConstraint(particle(count\particle-3),particle(count\particle),1)
CreateConstraint(particle(count\particle),particle(count\particle-2),1)
CreateConstraint(particle(count\particle-1),particle(count\particle-3),1)
EndProcedure
Procedure CreateChain(x,y)
CreateParticle(x,y,0,0.01)
CreateConstraint(particle(count\particle-1),particle(count\particle),1)
constraint(count\constraint)\length=5
EndProcedure
Procedure RenderHalfSpace()
Protected t.d
Protected y1.d
Protected y2.d
Protected x1.d
Protected x2.d
If Abs(halfspace()\v\x)>Abs(halfspace()\v\y)
t=-halfspace()\p\x/halfspace()\v\x
y1=halfspace()\p\y+t*halfspace()\v\y
t=(Screen\x-halfspace()\p\x)/halfspace()\v\x
y2=halfspace()\p\y+t*halfspace()\v\y
LineXY(0,y1,Screen\x,y2,RGB(255,255,255))
LineXY(Screen\x/2,(y1+y2)/2,Screen\x/2-halfspace()\n0\x*100,(y1+y2)/2-halfspace()\n0\y*100,RGB(255,255,255))
Else
t=-halfspace()\p\y/halfspace()\v\y
x1=halfspace()\p\x+t*halfspace()\v\x
t=(Screen\y-halfspace()\p\y)/halfspace()\v\y
x2=halfspace()\p\x+t*halfspace()\v\x
LineXY(x1,0,x2,Screen\y,RGB(255,255,255))
LineXY((x1+x2)/2,Screen\y/2,(x1+x2)/2-halfspace()\n0\x*100,Screen\y/2-halfspace()\n0\y*100,RGB(255,255,255))
EndIf
EndProcedure
Procedure Render() ;draw stuff
Protected i.l
ClearScreen(RGB(0,0,0))
StartDrawing(ScreenOutput())
DrawingMode(#PB_2DDrawing_Outlined | #PB_2DDrawing_Transparent)
DrawText(10,50,"Rechtsklick : Particle greifen",RGB(100,0,255))
DrawText(10,65,"Linksclick : Particle erstellen",RGB(100,0,255))
DrawText(10,80,"Leertaste : Box erstellen",RGB(100,0,255))
DrawText(10,95,"Entf : Particle löschen",RGB(100,0,255))
;Render Particles
For i=1 To count\particle
Circle(particle(i)\p\x,particle(i)\p\y,particle(i)\r,RGB(100,100,255))
Next
If *SelectedParticle<>#Null
Circle(*SelectedParticle\p\x,*SelectedParticle\p\y,*SelectedParticle\r+5,RGB(255,0,0))
EndIf
;Render Constraints
For i=1 To count\constraint
FrontColor(RGB(255,0,100))
LineXY(constraint(i)\p1\p\x,constraint(i)\p1\p\y,constraint(i)\p2\p\x,constraint(i)\p2\p\y)
Next
;Render Halfspaces
ResetList(halfspace())
While NextElement(halfspace())
renderhalfspace()
Wend
Box(MouseX()-2,MouseY()-2,5,5,RGB(255,0,0))
FrontColor(RGB(255,255,255))
DrawText(0,0,"fps : "+Str(fps))
DrawText(0,15,"p+c : "+Str(count\constraint+count\particle))
StopDrawing()
FlipBuffers()
EndProcedure
Procedure controls()
ExamineMouse()
ExamineKeyboard()
If MouseButton(1) And MouseClick=0
MouseClick=1
ElseIf MouseButton(1)
MouseClick=2
EndIf
If MouseButton(2) And MouseClick=0
MouseClick=3
ElseIf MouseButton(2)
MouseClick=4
EndIf
If MouseButton(2)=0 And MouseButton(1)=0
MouseClick=0
EndIf
If MouseButton(1) And timer=1
r=10+Random(15)
CreateParticle(MouseX(),MouseY(),r,r/20)
EndIf
If MouseButton(2) And *SelectedParticle<>#Null
vect(*SelectedParticle\p,MouseX(),MouseY())
Else
*SelectedParticle=PointToParticle(MouseX(),MouseY(),5)
EndIf
If KeyboardReleased(#PB_Key_Space)
CreateBox(MouseX()-25,MouseY()-25,MouseX()+25,MouseY()+25,20,1)
EndIf
If KeyboardReleased(#PB_Key_Delete)
If *SelectedParticle<>#Null
deleteparticle(*SelectedParticle)
EndIf
EndIf
ExamineKeyboard()
ExamineMouse()
EndProcedure
AddHalfSpace(1,1,-1,0) ;Bildschirmränder
AddHalfSpace(1,1,0,1)
AddHalfSpace(screen\x-1,0,0,-1)
AddHalfSpace(0,Screen\y-1,1,0)
;Anfangszeug wird erstellt
CreateParticle(50,400,15,0)
For i=1 To 10
CreateParticle(50+30*i,400,15,0.5)
CreateConstraint(particle(count\particle),particle(count\particle-1),1)
Next
Particle(count\particle)\m=0
CreateParticle(100,300,20,1)
Particle(count\particle)\a\y=-0.2
CreateParticle(100,340,1,0.01)
CreateConstraint(particle(count\particle),particle(count\particle-1),1)
For i=1 To 20
CreateChain(100,340+i*5)
Next
For i=1 To 10
CreateChain(100+5*i,440)
Next
For i=1 To 20
CreateChain(150,440-i*5)
Next
CreateParticle(150,300,25,1)
Particle(count\particle)\a\y=-0.2
createconstraint(Particle(count\particle),Particle(count\particle-1),1)
;*************MAIN PROGRAM****************
Init()
countAll()
Repeat
Repeat
WEvent=WindowEvent()
Select WEvent
Case #PB_Event_CloseWindow
End
EndSelect
Until WEvent=0 ;Bis es keine neuen Informationen gibt.
timer+1
If timer>=5
timer=0
EndIf
FrameCount()
render()
CalcStep()
controls()
Until KeyboardPushed(#PB_Key_Escape)
End
[edit] neueste Versionen werden wegen der Größe ab nun als download reingestellt
neueste Version:
http://www.xup.in/dl,82663857/CircleVer ... cs0.1.rar/



{kind=link}