
J'ai aussi fini la partie HPA*.
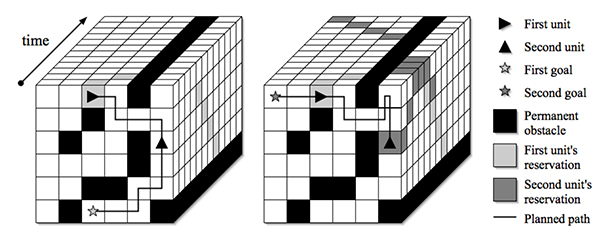
Le pathfinding coopératif permet aux unités de se mettre d'accord et d'éviter les situations de blocage.
Il n'est pas nécessaire de relancer le pathfinding A* puisqu'il s'agit en fait d'un A* en 3 dimension: X,Y et Temps. (Bien sûr A* est implémenté avec un tas et la map une hashtable "x/y/t".)
Ca donne une impression d'intelligence aux agents.

Voici le lien pour télécharger le listing test.Ajouter/Effacer un obstacles [clic Gauche]
Sélectionner une unité [clic Gauche]
Pathfind de l'unité vers un but [clic droit]
Ajouter une unité [Espace]
Supprimer l'unité sélectionnée [Suppr]
http://wordoxhelper.free.fr/Projet%20pathfinding.zip
Le fichier à compiler est Main.
Problèmes connus de ce test.
1- Deadlock possible si on joue dans un couloir de 1 case de large (les unités se repoussent à droite, puis à gauche sans arrêt)
2- Ne pas ajouter d'unité sur le chemin et pendant le déplacement d'une unité; à moins de relancer son pathfinding par clic droit.
3- Ne pas envoyer d'unité dans un espace inaccessible.[résolu]
4- agent devient passant dans certaines configurations à partir de 11...
5- FPS bas à revoir[résolu]
Merci de reporter tout autre bug.
MAJ 25/03/14: selection multiple et HPA à un niveau intégré.
MAJ 28/03/14: Code revu, plus de plantage, pathfind vers le point le plus proche si but inaccessible.
Voici le lien en anglais de l'article qui m'a inspiré: http://www0.cs.ucl.ac.uk/staff/D.Silver ... Wisdom.pdf
Voici le lien en anglais de l'article qui m'a inspiré pour le HPA*: http://webdocs.cs.ualberta.ca/~jonathan ... s/jogd.pdf


